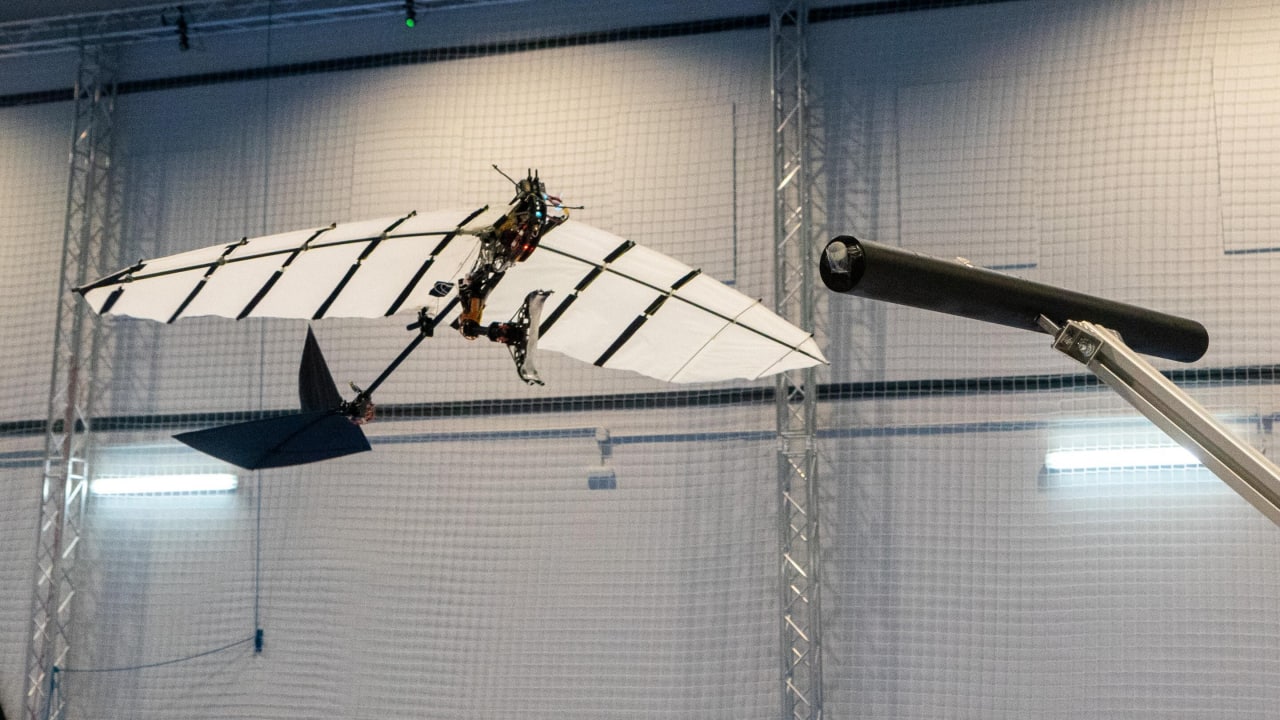
محققان دانشگاه اکول پلیتکنیک فدرال لوزان (EPFL) سوئیس روشی را ابداع کردهاند که به یک ربات بالدار پرنده اجازه میدهد تا با استفاده از مکانیزم شبیه به پنجه، بهطور کاملاً مستقل روی یک سطح افقی فرود بیاید. این نوآوری میتواند بهطور قابلتوجهی دامنه وظایف مربوط با رباتها را گسترش دهد.
«رافائل زوفری»، دانشجوی فوق دکترا آزمایشگاه سیستمهای هوشمند (LIS) و Biorobotics ab (BioRob) در دانشکده مهندسی و محقق اصلی این مقاله، همراه با همکاران خود در دانشگاه دانشگاه سویل، اسپانیا این ربات پرنده 700 گرمی را بهعنوان بخشی از پروژه اروپایی GRIFFIN توسعه داده است.
او توضیح میدهد:
«این اولین مرحله از یک پروژه بزرگتر است. زمانی که یک ربات پرنده بتواند بهطور مستقل روی شاخه درخت فرود بیاید، آنگاه این پتانسیل را دارد که وظایف خاصی را انجام دهد؛ مانند جمعآوری نمونههای بیولوژیکی یا انجام اندازهگیریهای مربوط به درختان. درنهایت، حتی میتواند روی ساختارهای مصنوعی فرود بیاید که این امر زمینههای کاربردی بیشتری را فراهم خواهد کرد.»
زوفری همچنین توضیح میدهد که این توانایی باعث میشود تا رباتهای پرنده که مانند بسیاری از پهپادها عمر باتری محدودی دارند، دوباره بتوانند با استفاده از انرژی خورشیدی شارژ شوند.
در طول توسعه این ربات، مشکلاتی سد راه مهندسان شده است. به عنوان مثال، ربات پرنده درحین نشستن باید سرعت خود را کاهش دهد و همچنان فرایند پرواز خود را حفظ کند؛ پنجه آن باید بهاندازهای قوی باشد که بتواند سطح را بگیرد و همچنین وزن ربات را تحمل کند.

محققان با تجهیز ربات به یک کامپیوتر کاملاً داخلی و سیستم ناوبری که با یک سیستم ضبط حرکت خارجی برای کمک به تعیین موقعیت خود کامل میشود، موفق شدند تا بر این مشکلات غلبه کنند. پنجه نیز بهگونهای طراحی شده است که حرکت روبهجلوی ربات را در هنگام تماس با سطح درک کند و بتواند با سرعت و شدت قابلقبولی بسته شود تا وزن آن را تحمل کند.
زوفری و همکارانش برای آینده، بهدنبال راههایی هستند تا قابلیتهای ربات پرنده خود را بهبود بخشند و آن را برای استفاده در محیطهای بیرونی و غیرقابل پیشبینیتر ارتقا دهند؛ زیرا آزمایشهای فعلی آن در محیطهای داخلی انجام شده است.












