
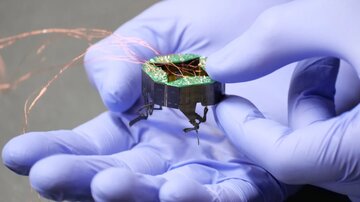
غزال زیاری: این ربات کوچک از یک توپ پینگ پونگ سبکتر است ولی بدنش به نحوی منعطف است که میتواند در کوچکترین فضاها وارد شود.
در مطالعه جدیدی که توسط Advanced Intelligent Systems منتشر شده، محققان دانشگاه کلورادو بولدر، اخیرا از حشره رباتیک مفصلی سازگار خود که دارای چندین پا است و Clari نام گرفته، رونمایی کردند. این ربات زیبا، از یک توپ پینگپونگ سبکتر است و در کف دست جا میشود. ولی شما نباید گول ابعاد کوچک و وزن سبک آن را بخورید. کلاری، به نحوی ساخته شده که توانایی این را دارد که با اتکا به ساختار بدنه انعطافپذیرش، فشرده شده و در فضاهای تنگ نفوذ کند. این ربات شبیه سوسک، یک ابزار اکتشافی برای مناطق کوچکی مثل موتورهای جت و همچنین ماموریتهای جستجو و نجات به کار گرفته خواهدشد.
ساخت کلاری با الهام گرفتن از سوسکها
طبق گفته کائوشیک جایارام، استادیار مهندسی مکانیک و یکی از نویسندگان این مقاله، ایده ساخت کلاری تا حد زیادی با الهامگیری از سوسکهایی که به شکل روزمره در زندگی میبینیم، بوده است. او بهعنوان یک دانشجوی کارشناسی ارشد، رباتی را مهندسی کرد که قادر است تا با فشرده کردن خودش، نیمی از ارتفاعش را کم کند؛ دقیقا شبیه سوسکهایی که با جمع کردن بدنشان از شکافهای کوچک ساختمان عبور میکنند.
بیشتر بخوانید:
- اتفاق حیرتآوری که در جام جهانی زنان رخ داد
- معجزه با الماس و تیتانیوم در شاهکار ۲۰۰ میلیارد تومانی بوگاتی
او در این رابطه گفت:« ما توانستیم تا ربات را به نحوی بسازیم که از شکافهای عمودی عبور کند. اما این مرا به این فکر فرو برد که این تنها یکی از راههای فشردهسازی است. راههای دیگر چیست؟»
درحقیقت میتوان گفت که ساخت کلاری، یک تکرار جدید است که براساس پیشرفتهای رباتیک نرم قبلی ساخته شده است. کلاری با شکل و ساختاری استاندارد، شبیه یک مربع با چهار پای مفصلی است که هریک توسط محرکها و مدارهای دو گانه کنترل میشوند. در صورتی که کلاری در یک محیط سخت و تنگ قرار بگیرد، میتواند ارتفاعش را از ۳.۳ سانتیمتر به ۲ سانتیمتر کاهش دهد. البته اعضای تیم جایارام بر این باور هستند که رباتهای آتی کلاری، انعطاف پذیرتر نیز خواهند بود.
کلاری، از سوسک تا آمیب
جایارام ادامه داد:« آنچه ما میخواهیم، رباتهای همه منظورهای هستند که بتوانند شکلشان را تغییر داده و با شرایط محیطی مختلف سازگار شوند.» او نسخه نهایی این ربات را به آمیبی تشبیه میکند که شکل مشخصی ندارد و بسته به نیازش برای حرکت سریع یا خوردن غذا، میتواند شکلش را تغییر دهد.
با این وجود رباتهای کلاری، میتوانند از ساختار منحصر به فرد و انعطافپذیری پاهایشان برای عبور از مناطق بحرانزده برای جستجوی قربانیان مفقود شده بهره ببرند و یا بدون نیاز به تفکیک و جداسازی یک محصول کامل و بزرگ، به بررسی قطعات و بخشهای مختلف دستگاهها بپردازند. اما اعضای تیم جایارام امیدوارند که در نهایت بتوانند مدلهای بیسیمی را بسازند که قادر به انجام حرکات و اکتشافات مستقل باشند.
جایارام ادامه داد:« امروزه بیشتر رباتها، عموما شبیه یک مکعب هستند. ولی چرا باید همه آنها شبیه به هم باشند؟ حیوانات هم در ابعاد و اشکال مختلف در دنیا دیده میشوند.»
منبع: popsci
۵۸۵۸







