از کاربردهای موشن کنترل در اتوماسیون صنعتی؛ میتوان به ماشین آلات بسته بندی، سیستمهای چاپ و لیبلگذاری، ماشینهای CNC، نوار نقالهها و دستگاههای پزشکی اشاره کرد.
اپلیکیشنهای مرتبط با موشن کنترل
موشن کنترل شامل چهار اپلیکیشن یا حرکت اصلی است که ترکیب این اپلیکیشنها، منطق یک دستگاه یا حرکت یک محور را شکل میدهد. اپلیکیشنها مانند حروف الفبا هستند که تعداد آنها کم و مشخص بوده ولی ترکیب آنها میتواند پیچیده و زیاد باشد. چهار اپلیکیشن اصلی موشن کنترل بهشرح زیر هستند:
حرکت P2P (Point to Point)
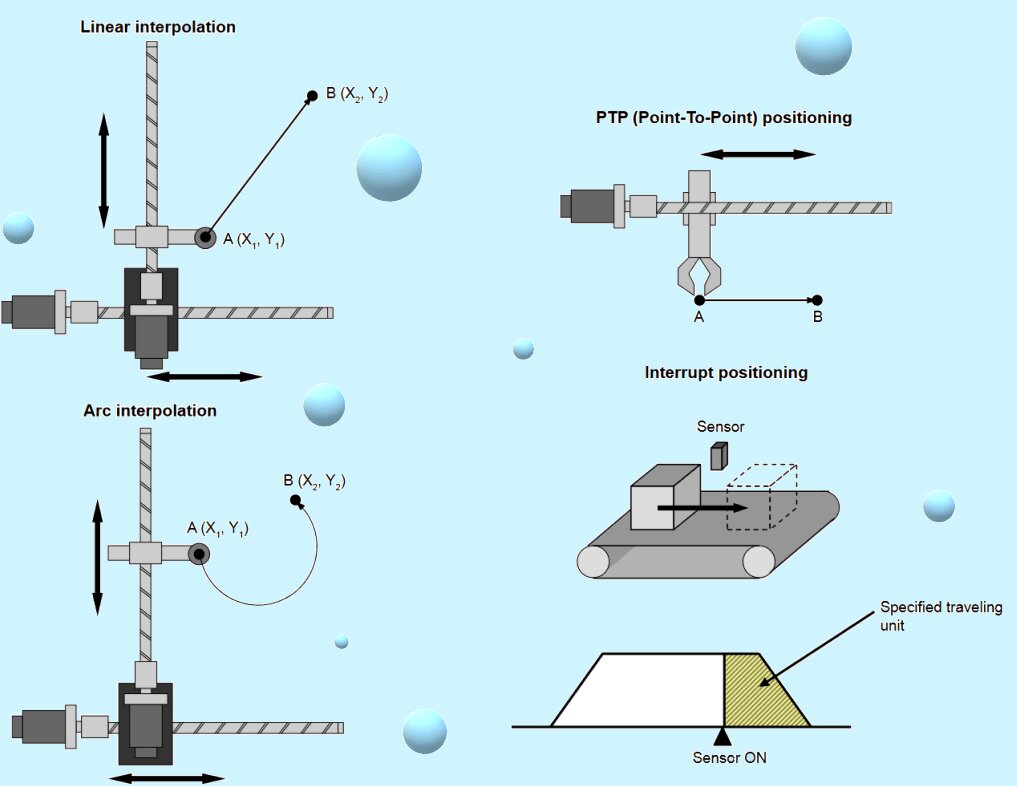
حرکت P2P یا نقطه به نقطه، سادهترین مدل حرکت است که برای یک محور تعریف میشود. در این اپلیکیشن پروفایل حرکتِ محور یعنی میزان جابهجایی، سرعت حرکت و همچنین شتاب شروع به حرکت (ACC) و شتاب توقف موتور (DEC) در ابتدا مشخص میشود و براساس پروفایل حرکت، موتور شروع به چرخش میکند. اپلیکیشن P2P به صورت تک محور اجرا میشود و بر اساس پروفایل حرکت، محور از نقطه A شروع به حرکت میکند و در نقطه B متوقف میشود. این اپلیکیشن با همه PLCهای ترانزیستوری دلتا به همراه سروو موتور دلتا قابل اجرا است. در حقیقت PLC در این اپلیکیشن با تولید قطار پالس (PTO)، حرکتِ انکودرِ متصل به محور را بهصورت مجازی شبیهسازی میکند و سرو درایو، براساس تعداد و فرکانس قطار پالس، موتور را به حرکت در میآورند.
حرکت Interrupt Positioning یا Touch Probe (مارک تا مارک)
اپلیکیشن مارک تا مارک مشابه و معادل حرکت P2P است با این تفاوت که موقعیت سنسور خارجی یا سنسور مارک، محل توقف محور را مشخص میکند. همانند حرکت P2P، در این اپلیکیشن نیز پروفایل حرکت بر اساس میزان جابهجایی، سرعت حرکت، شتاب شروع و شتاب توقف موتور تعریف میشود با این تفاوت که درصورت فعال شدن سنسور مارک، موتور در موقعیت مشخصی پس از گذر از سنسور مارک توقف کند. این نوع حرکت در برش فیلمهای چاپ خورده و در شکلدهی یا فرمدهی فیلمهای بستهبندی بسیار پرکاربرد است. با تمام PLCهای ترانزیستوری دلتا به اضافه سرو موتور یا استپر موتور، میتوان این اپلیکیشن را اجرا کرد. PLC با خواندن سنسور مارک و تولید پالس، و فرمان به درایوها حرکت محور را شبیه سازی میکند.
حرکت Interpolation (درون یابی)
حرکتهای اینترپولیشن برای حداقل دو تا چند محور (6 محور) تعریف میشوند که محورها با هم حرکت میکنند و با هم متوقف میشوند. با این توضیح که مجری نهایی یا End Effector، شکل یا منحنیای از پیش تعیین شدهای را دنبال میکند. این نوع از حرکتها را میتوان به دو دسته درونیابی خطی (Linear Interpolation) یا درونیابی دایرهای (Curve Interpolation) تقسیمبندی کرد. در حرکت درونیابی خطی، مجری نهایی بر روی خطوط راست حرکت میکند و قادر به حرکت بر روی خطوط منحنی نیست. مثلاً میتوان با مجری نهایی اشکالی مثل مربع یا مثلث را ترسیم کرد ولی امکان حرکت مجری نهایی به شکل دایرهای وجود ندارد. در حرکتهای درونیابی دایرهای، علاوه بر رسم اشکال خطی میتوان مسیرهای منحنی شکل را ترسیم کرد. در حرکتهای اینترپولیشن یک دستگاه، فارغ از خطی یا دایرهای بودن، اگر با PLC تعریف و اجرا شود، به دستگاه NC کنترل میگویند که مخفف Numeric Control یا کنترل عددی است. حرکت NC با همهی PLC دلتا بهغیر از مدل 14SS2، بهصورت خطی و دایرهای برای دو محور قابل اجرا و پیادهسازی است. اگر مسیر حرکت مجری نهایی یا End Effector در فضای دو بعدی و سه بعدی بهصورت ابر نقاط با فرمت G-Code تعریف شود، به این دستگاه CNC کنترل میگویند.
CNC مخفف عبارت Computer Numeric Control (کنترل عددی با کامپیوتر) است. در حقیقت کامپیوتر با پردازش فایل G-Code و تبدیل دستورات G-Code به فرامین NC، مسیر حرکت مجری نهایی دستگاه را در فضای کاری مشخص میکندو بلوغ و پختگی اپلیکیشن Interpolation را میتوان در کنترلرهای CNC دید. جاییکه کاربر با استفاده از نرم افزارهای CAM نقشههای CAD را به دستورات G-Code تبدیل میکند و کنترلر CNC با تفسیر دستورات G-Code فرامین لازم را برای حرکت مجری نهایی به درایوها میدهد.
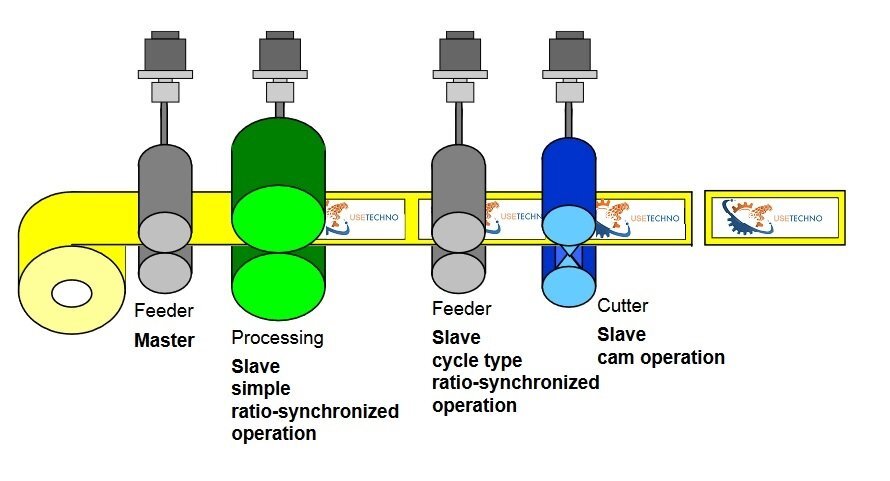
حرکت سنکرون یا سینک یا اپلیکیشن 1.5 محور
حرکت سنکرون یا یک و نیم محور، پایه و اساس عملکرد سرو موتور است در حقیقت تعریف کلمه سرو یا برده بر مبنای اپلیکیشن سنکرون شکل گرفته است. یعنی سرو موتور پیرو، دنبال کننده، و تابع انکودر اصلی است. وقتی سرو درایو را با قطار پالس راه اندازی میکنیم، درحقیقت حرکت انکودر مستر را برای داریو شبیه سازی و اجرا میکنیم. حرکت سروو موتور بر مبنای موقعیت و سرعت انکودر مستر شکل میگیرد. درگذشته و قبل از توسعه سیستمهای مرتبط با سروو، حرکتهای سنکرون با استفاده از مکانیزم های مکانیکی مثل انواع بادامکها، چرخدندهها، چرخ زنجیرها و ... پیاده سازی و اجرا میشدند. امروزه با توسعه سیستمهای مرتبط با سرو، مکانیزمهای مکانیکی جای خود را به سروو موتورها دادند. اما اساس و اصول طراحی مهندسی، تغییر چندانی نکرده است. در گذشته بر مبنای مکانیزمهای چهار میلهای، شش میلهای و اصول هندسه اقلیدسی انواع بادامک و چرخدندهها را طراحی میکردند. اکنون با علم حساب دیفرانسیل و کمی انتگرال انواع مکانیزم مکانیکی را بصورت نرم افزاری درون سرو درایوها طراحی میکنند. درگذشته با تغییر محصول نهایی، اجزای مکانیکی دستگاه را میبایست بر مبنای محصول جدید تعویض میکردند اما امروزه تمامی مکانیزمهای مکانیکی بهصورت نرمافزاری تعریف و تنظیم میشود و نیازی به تغییرات مکانیکی در دستگاه نیست. به علم طراحی مکانیزمهای مکانیکی درون سروو درایو یا موشن کنترل ECAM میگویند که حرف E مخفف Electronic و CAM معرف بادمک یا مکانیزم مکانیکی است.
در حال حاضر سرو درایوهای دلتا در مدلهای B2 و A2 به بازار عرضه شدهاند که در مدل B2 یا سری Basic مکانیزم مکانیکی یا ECAM بهصورت گیربگس خطی درون سرو درایو تعریف شده است و کاربر میتواند ضرایب این گیربکسِ خطی را که معروف به گیربکسِ الکترونیکی است تغییر دهد. اما در سروو درایوهای A2 دلتا یا سری Advance علاوه بر گیربکسِ خطی، کاربر امکان طراحی و توسعه ECAM را بر مبنای نیاز خود دارد و میتواند مکانیزمهای دیگری مثل گیربکسِ ایندکس، گیربکسِ دیفرانسیل (مانند دیفرانسیل خودرو)، مکانیزم لنگ و لغزنده و ... را درون سرو بهصورت نرمافزاری طراحی و اجرا کند.
قدم اول در پروژههای مبتنی بر موشن کنترل، شناخت اپلیکیشنهای کاربردیِ دستگاه است. شناخت کافی بر اپلیکیشنهای موشن کنترل سبب میشود که مجری یا برنامهنویس، حتی در صورت قادر نبودن به اجرا، در انتخاب محصول از بازار دچار اشتباه نشده و Road Map یا مسیر اجرای پروژه تا انتهای کار به درستی مشخص میشود. اما اگر مجری در ابتدای کار، تشخیص و برداشت اشتباهی از اپلیکیشنهای دستگاه داشته باشد کار آن طور که باید به سرانجام نمیرسد و کارفرما همواره از این موضوع که دستگاه ضایعات بیشتر، یا سرعت پایینتری نسبت به دستگاههای مشابه وارداتی دارد، گلهمند خواهد بود.
ما در مجموعهی فنی مهندسی یوزتکنو، نمایندگی دلتا در تهران، علاوه بر مشاوره و اجرای پروژههای گوناگون در زمینهی موشن، با برگزاری دورههای تخصصی موشنکنترل دلتا (اپلیکیشنهای Flying Shear (برش در حرکت)، Rotary Cutter (برش روتاری)، برنامهنویسی ST و ...) و ارائه راهکارهای هوشمندانه، به مهندسین محترم یاری رسانده، تا تواناییهای خود را افزایش دهند و بهعنوان افراد حرفهای و متخصص به فعالیت در پروژههای گوناگون بپردازند.