مریخنورد استقامت ناسا برای نخستینبار با استفاده از نقشههایی که توسط هوش مصنوعی طراحی شده بود، در سطح سیاره سرخ حرکت کرد. در اوایل ماه دسامبر، این ربات ششچرخ بهجای پیروی از دستورات دقیق رانندگان انسانی روی زمین، مسیرهایی را دنبال کرد که توسط هوش مصنوعی مولد ایجاد شده بود و توانست با موفقیت از زمینهای ناهموار مریخ عبور کند.
مهندسان آزمایشگاه پیشرانش جت ناسا (JPL) با همکاری شرکت آنتروپیک و استفاده از مدلهای هوش مصنوعی کلود این مأموریت را ممکن کردند. سیستم هوش مصنوعی با استفاده از مدلهای بینایی-زبانی، دادههای سطح مریخ شامل تصاویر، نقشههای عوارض زمین و اطلاعات خطرات احتمالی را تحلیل کرد.
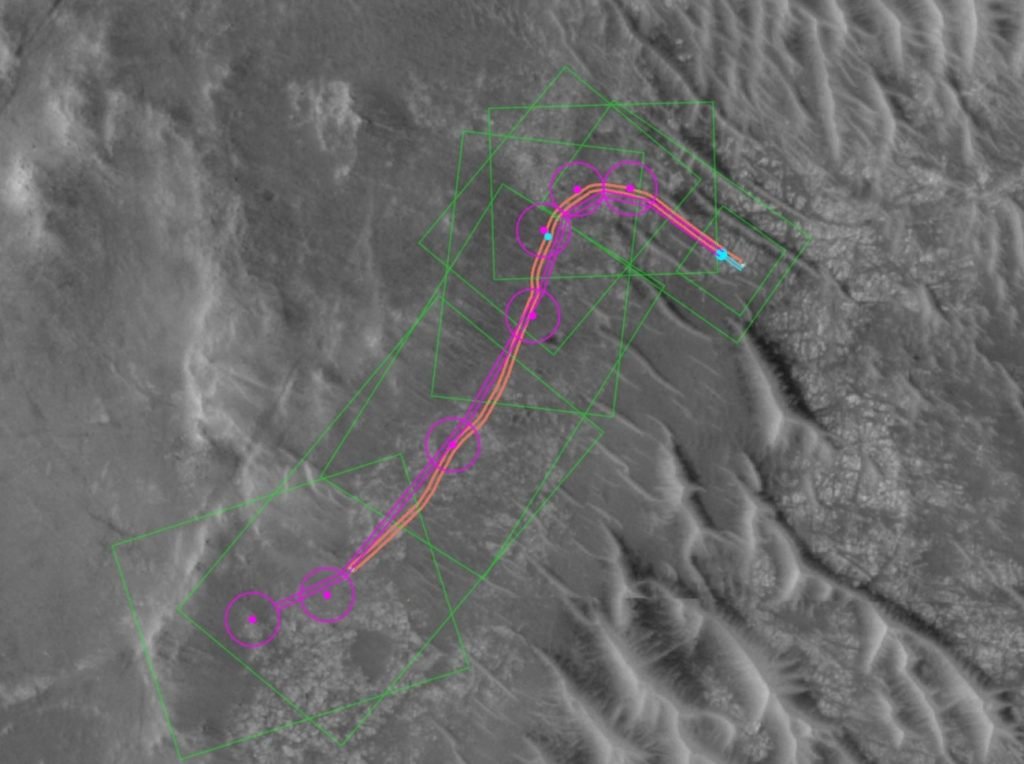
هوش مصنوعی توانست با شناسایی بستر سنگی، تپههای شنی و شیبهای تند، مسیری امن را ترسیم کند. در نتیجه این برنامهریزی، استقامت توانست در روز ۱۷۰۷ مریخی خود، مسافت ۲۱۰ متر و دو روز بعد، مسافت ۲۴۶ متر را بدون دخالت مستقیم انسان طی کند.
با وجود خودکفایی هوش مصنوعی، مهندسان ناسا جانب احتیاط را رعایت کردند و دستورات را مستقیماً به مریخ نفرستادند. تیم فنی ابتدا تمام دستورات تولیدشده توسط هوش مصنوعی را با استفاده از دوقلوی دیجیتال مریخنورد استقامت روی زمین شبیهسازی کرد.
این نسخه مجازی بیش از ۵۰۰ هزار متغیر تلهمتری را بررسی کرد تا از سازگاری دستورات با نرمافزار پرواز مریخنورد اطمینان حاصل شود. تنها پس از موفقیت در این آزمایشهای سختگیرانه بود که دستورات نهایی برای مریخنورد ارسال شد تا از بروز هرگونه حادثه جلوگیری شود.
استفاده از هوش مصنوعی برای مسیریابی، بار کاری اپراتورهای انسانی را بهشدت کاهش میدهد و سرعت عملیات روزانه را بالا میبرد. از آنجایی که فاصله زیاد مریخ تا زمین باعث تأخیر در ارسال سیگنالها میشود، کنترل همزمان غیرممکن است و تیمها معمولاً مسیرها را قدمبهقدم برنامهریزی میکنند. مهندسان ناسا امیدوارند در آینده هوش مصنوعی بتواند این مشکل را برطرف کند.